online retailer,bulk & wholesale and OEM/ODM e-shop of motor and controller, Shenzhen weigena technology co., LTD")



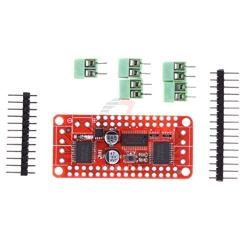
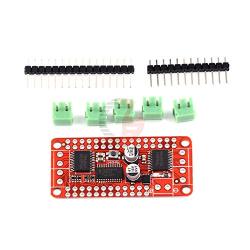
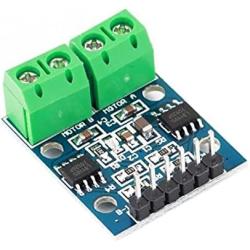
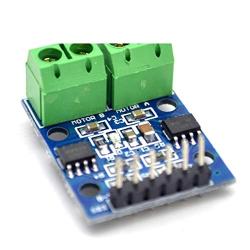
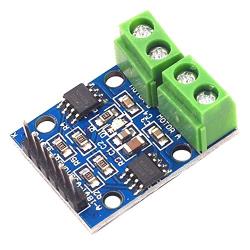
2.5V-12V 2CH L9110S H-Bridge Stepper Motor Driver Controller Board Dual Channel L9110 DC Motor Drive Control Module for Arduino
Availability: Pre-Order, Inquiry Price
About this product
*2.5V-12V 2CH L9110S H-bridge Stepper Motor Driver Controller Board Dual Channel L9110 DC Motor Drive Control Module for Arduino
*Developed country Estimated Delivery Time: 7-18 days by Special line. 10-30 days for other country..We provide Expedited Shipping service : 3-8 days.(excluding handling time).If the order amount above US $200, we will use Expedited Shipping service for free.
*2.5V-12V 2CH L9110S H-bridge Stepper Motor Driver Controller Board Dual Channel L9110 DC Motor Drive Control Module for Arduino
*Developed country Estimated Delivery Time: 7-18 days by Special line. 10-30 days for other country..We provide Expedited Shipping service : 3-8 days.(excluding handling time).If the order amount above US $200, we will use Expedited Shipping service for free.
*Date First Available : October 21, 2019
Description
Features:
onboard two the L9110S motor control chip
the module can simultaneously drive two DC motors or a 4-wire 2-phase stepper motor
the module input voltage :2.5-12V
the 800mA continuous current output capability per channel
Specifications:
1. Low static work current
2. Power supply voltage: DC2.5-12V
3. Each channel has 800mA continuous current output
4. Low saturation pressure drop
5. TTL/CMOS output level compatible, can be connected directly to the CPU
6. Output built-in clamping diode, apply to the perceptual load
7. Control and drive integrate in IC
8. Have pin high pressure protection function
9. Working temperature: 0-80 ?
10.Size:29.2(mm)x23(mm)
Package Included:
1 x Stepper Motor Driver Module
51 test code:
#include
sbit MOTOR_A_1 = P0 ^ 0;
sbit MOTOR_A_2 = P0 ^ 1;
sbit MOTOR_B_1 = P0 ^ 2;
sbit MOTOR_B_2 = P0 ^ 3;
void delay(unsigned long cnt)
{
while(cnt--);
}
void forward(void)
{
MOTOR_A_1 = 1;
MOTOR_A_2 = 0;
MOTOR_B_1 = 1;
MOTOR_B_2 = 0;
}
void backward(void)
{
MOTOR_A_1 = 0;
MOTOR_A_2 = 1;
MOTOR_B_1 = 0;
MOTOR_B_2 = 1;
}
void main(void)
{
EX0 = 1;
EX1 = 1;
EA = 1;
while(1)
{
forward();
delay(30000);
backward();
delay(30000);
}
}
Related Products







1pcs L9110S H-Bridge Stepper Motor Dual DC Stepper Motor Driver Controller Board Module L9110S L9110
MM29189
L9110S H-Bridge Stepper Motor Dual DC Stepper Motor Driver Controller Board Module L9110S L9110
MM29210